Затенение и фотометрические стереоскопические изображения

Содержание:
Описание
Роль, которую играет грим в театре, а также повсеместное распространение косметики в повседневной жизни заставляют предположить, что в зрительной системе человека действуют процессы, специально предназначенные для определения формы объектов по данным о затенении поверхностей. Похоже, однако, что возможности этих процессов невелики и определяются они комбинацией тех сведений, которые удается извлекать из затенения, и информации, содержащейся в ограничивающих контурах. Затенение само по себе лишь в слабой степени влияет на выявление формы, и поэтому одна из наиболее интересных теоретических проблем, возникающих в связи с предварительной обработкой изображений в зрительной системе человека (наряду с проблемой цвета), — это определение того, какую именно информацию и сколько можно получить из данных о затенении.Задача определения формы объектов по данным о затенении поверхностей в чисто теоретическом плане подвергалась тщательному анализу одной из самых первых. Б. К. П. Хорн в своей докторской диссертации, кратко изложенной в его статье, показал, каким образом могут быть решены дифференциальные уравнения, связывающие яркость изображения с ориентацией поверхности, при условии, что освещение обычное, а коэффициент отражения поверхности постоянен и известен.
Затем Хорн изложил свои результаты на языке пространства градиентов, что существенно облегчило их понимание. Основное применение его результаты нашли в разработке методов анализа затенения возвышенностей. Допустим, например, что выбирается определенный район в Швейцарских Альпах. Как этот район будет выглядеть в 10 часов утра в солнечный летний день или в 4 часа пополудни? Рисунок 3.72

Рис. 3.72. Сопоставление синтезированного и реального изображения одного из районов Швейцарских Альп: a — изображение, полученное с помощью методов Хорна на основе карты местности и карты отражательной способности для заданного времени дня; б — фотография, полученная со спутника ’’Ландсат”
показывает, что методы Хорна дают возможность отвечать на такие вопросы. Сравнение синтезированного изображения с фотографией, полученной со спутника, дает информацию об особенностях отражательной способности поверхности Земли, свободную от влияния затенения, вызванного конкретными характеристиками наблюдаемого района и освещения.
Поскольку математический анализ задачи определения формы по данным о затенении является необходимым предварительным условием для любого сколь бы то ни было серьезного изучения способности человека решать эту задачу, я излагаю здесь наиболее важные идеи, связанные с таким математическим анализом. Читателю, интересующемуся подробностями, следует обратиться к работе, поскольку в моем изложении технике будет уделяться не слишком много внимания.
↑ Пространство градиентов
Первое, что требуется при обсуждении задачи определения формы объектов по данным о затенении — это разумный способ задания ориентации поверхностей. Для этого мы воспользуемся представлением, введенным в несколько различных контекстах Хаффманом и Макуэртом.
Пусть задана некоторая поверхность (рис. 3.73,а).
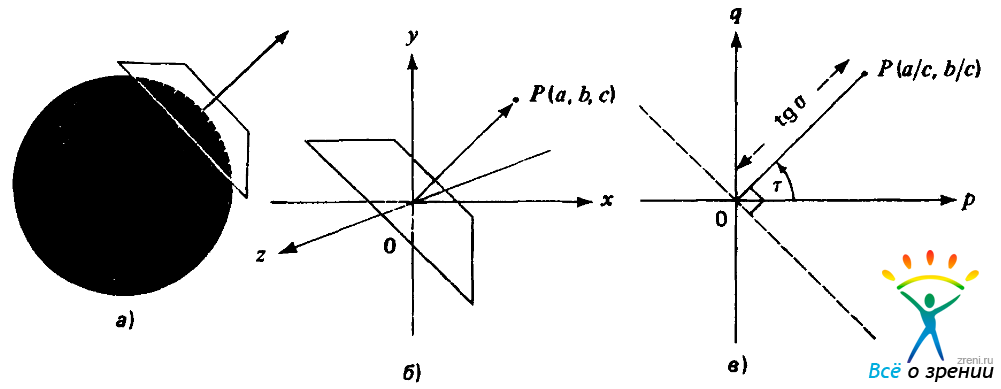
Рис. 3.73. К объяснению идеи пространства градиентов
При условии, что эта поверхность — гладкая, в некоторой заданной точке поверхности существует локальная касательная плоскость, т. е. существует некоторая плоскость, являющаяся локально касательной к заданной поверхности в данной точке,и существует локальная нормаль к заданной поверхности, представляющая собой нормаль к касательной плоскости в этой точке. Возьмем теперь ту же самую касательную плоскость, переместим ее в начало координат и построим к нет нормаль ОР, как это показано на рис. 3.73, б. Пусть точка Р имеет координаты (а, b, с). Совершенно очевидно, что длина нормали ОР несущественна —имеет значение лишь ее направление; поэтому с тем же успехом мы можем использовать точку Р с координатами (а/с, b/c, 1). Теперь точку P' можно задавать двумя числами (а/с, b/с), т. е. просто как точку Р двухмерного пространства (рис. 3.73, в). Это и есть представление ориентации поверхности в пространстве градиентов.
Использование пространства градиентов дает элегантный способ представления ориентации поверхности. Несколько примеров помогут лучше понять его свойства. В случае фронтальной плоскости, когда нормаль к поверхности направлена непосредственно к наблюдателю, а = b = 0 и точка Р совпадает с началом координат 0 (см. рис. 3.73, в). Допустим теперь, что эта плоскость поворачивается по часовой стрелке вокруг вертикальной оси, как это показано на рис. 3.74, а.
[banner_centerrs] {banner_centerrs} [/banner_centerrs]
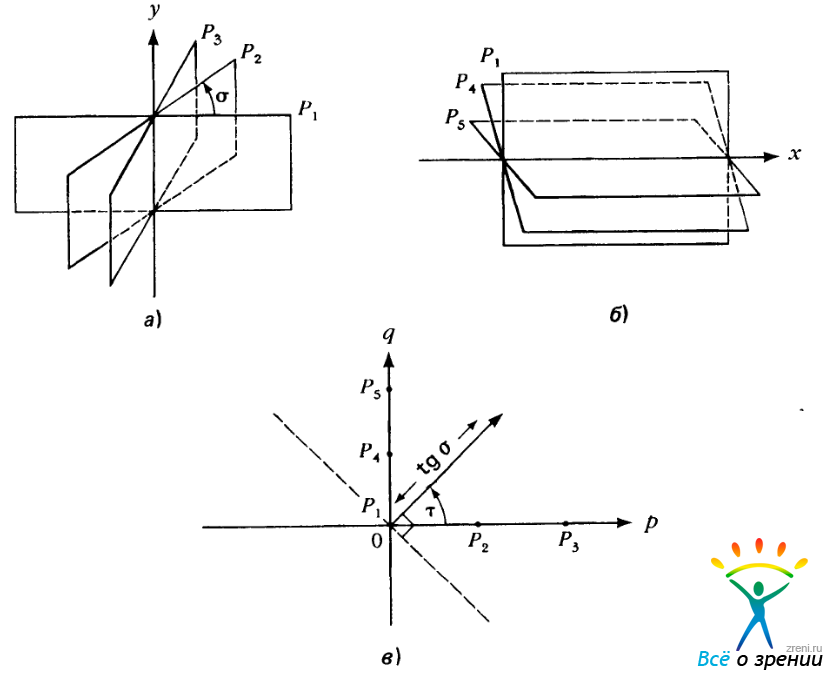
Рис. 3.74. К объяснению идеи пространства градиентов
При этом точка Р постепенно перемещается вправо вдоль оси р (Р2, Р3), как это показано на рис. 3.74, в, причем ее расстояние до начала координат 0 равно тангенсу угла отклонения плоскости. Если же поворачивать эту плоскость вокруг горизонтальной оси х, как это показано на рис. 3.74, б, то точка Р будет перемещаться вдоль оси q (Р4, Р5), как это показано на рис. 3.74, в, причем перемещение снова будет равно тангенсу угла отклонения плоскости. При вращении плоскости вокруг какой-либо промежуточной оси (она показана штриховой линией на рис. 3.74, в) точка Р перемещается по направлению ? от оси р под прямым углом к оси, вокруг которой производится поворот, как это показано на рис. 3.74, б. Угол ? представляет собой именно ту величину, которая в литературе по психофизике называется направлением отклонения плоскости, а угол между этим направлением и фронтальной плоскостью обычно называют отклонением плоскости, а иногда — ее наклонением. Я буду обозначать отклонение символом а. Расстояние между точкой Р и началом координат равно значению tg ?.
Быть может, читатель сочтет возможным потратить немного времени на то, чтобы поупражняться с этими понятиями на листе бумаги и до конца понять идею пространства градиентов, поскольку она важна и конструктивна. В частности, можно попробовать убедиться в том, что длина отрезка ОР равна значению tg ?.
↑ Освещение поверхности, ее отражательная способность и яркость изображения
Изучение задачи определения формы объектов по данным о затенении связано с отысканием способов нахождения ориентации поверхности по яркости изображения. Это сложная задача, поскольку яркость изображения зависит не от ориентации поверхности как таковой, а от характера освещения поверхности и ее функции отражения. В реальных условиях основное освещение часто имеет сложный характер, особенно в помещении. Вне помещения все обстоит несколько проще: солнце практически является удаленным точечным источником, а фоновый подсвет, который образует толстый слой облаков, практически равномерен — таким образом, эти два случая достаточно просты. Частичную облачность (днем) иногда можно рассматривать как комбинацию этих двух случаев. В том, что касается основного освещения, ситуация часто оказывается исключительно сложной из-за воздействия вторичных источников света: одна поверхность отбрасывает свет на другую, и, отражаясь уже от последней, свет попадает нам в глаза. Эти эффекты почти не поддаются аналитическому изучению.
Точно так же, как при удвоении акустического сигнала, влияние вторичных источников света приобретает особое значение для сцен, которые разыгрываются внутри помещений: свет от осветительной арматуры, установленной на потолке, может достигать поверхности кофейного столика непосредственно или отразившись от потолка или стен. Потолок способствует освещению стен, а стены, в свою очередь, отражают свет обратно, способствуя освещению потолка. Такой способ освещения называется взаимным. Совокупное воздействие этих эффектов придает исключительную трудность задаче определения формы объектов по данным о затенении; поэтому до сих пор не наблюдается реального прогресса в ее решении, за исключением случая очень простых условий освещения при удаленном точечном источнике. Хорну, однако, удалось успешно решить эту проблему, и мы кратко остановимся на том, как он этого добился.
Вторым фактором, оказывающим глубокое влияние на задачу определения формы объектов по данным о затенении, служит функция отражательной способности. Доля света, отражаемая от поверхности в направлении наблюдателя, зависит от микроструктуры отражающей поверхности. Эту зависимость обычно описывают некоторой функцией трех углов (они показаны на рис. 3.75):

Рис. 3.75. К определению углов падения i, наблюдения е и фазового g
угла падения i, образованного падающим от источника света лучом и нормалью к поверхности, угла наблюдения е, образованного линией прямой видимости наблюдателя и нормалью к поверхности, и фазового угла g, образованного падающим и рассеиваемым лучами света. Функция отражательной способности ф (i, е, g) — это отражаемая с единицы площади поверхности в направлении наблюдателя доля падающего света, приходящаяся на единицу телесного угла. Другими словами, это означает, что количество падающего на некоторый участок поверхности света, которое отражается в направлении некоторого датчика, непосредственно зависит от площади освещенного участка, значения функции ф (i, е, g) и угловых размеров датчика.
Известны различные функции отражательной способности. Идеальная ламбертова поверхность (идеальная матовая поверхность) выглядит одинаково яркой во всех направлениях и характеризуется простой функцией отражательной способности ф (i, е, g) = cos i. Поверхности запыленных каменистых объектов, наблюдаемых с большого расстояния, демонстрируют другой интересный тип функции отражательной способности: при фиксированном значении фазового угла g значение ф зависит лишь от отношения cos i/cos е. Такая зависимость справедлива для материала, из которого состоят моря на Луне, причем при наблюдении с Земли фазовый угол g действительно постоянен. Это обстоятельство существенно способствовало изучению топографии Луны.
Особенно простой функцией отражательной способности обладает полированная металлическая поверхность: функция ф принимает значение 1 при i = е и g = i + е (свойства идеального зеркала). Если поверхность отполирована не идеально, то значения функции ф несколько ’’размазываются” относительно 1 (часто такое размазывание соответствует свертке с гауссианом). Это размазывание (пятнистость) вызывает, в частности, интерес потому, что многие из тех поверхностей, с которыми мы сталкиваемся повседневно, обладают функцией отражательной способности, являющейся комбинацией двух составляющих, обусловленных диффузионно рассеянным (матовая поверхность) и зеркально отраженным (зеркальная поверхность) светом. Функция отражательной способности глянцевитой белой краски является результатом такой комбинации. Так, например, эта функция может иметь вид

где s — доля света, отражаемого зеркально; в этом выражении первый член соответствует составляющей, обусловленной зеркально отраженным светом, а второй — составляющей, обусловленной светом, рассеянным матовой поверхностью. Число n характеризует остроту пика первой составляющей; типичным для глянцевитой краски можно считать n = 16.
↑ Карта отражательной способности
Лучший путь к пониманию задачи определения формы объектов по данным о затенении лежит через понимание карты отражательной способности, обеспечивающей установление непосредственной связи яркостей изображения и ориентации поверхности.
Допустим, что мы работаем с некоторым конкретным типом поверхности, функция отражательной способности которой ф известна. Пусть также источник света и позиции наблюдения — удаленные, так что задача принимает простейшую форму. При этом каждая ориентация поверхности будет порождать конкретную картину значений яркости изображения, которую можно представить соответствующей картой в пространстве градиентов (р, q). В данном случае мы воспользуемся особенно простым вариантом карты отражательной способности: будут вычерчены кривые равной яркости (изолинии яркости), нормированной с помощью некоторого масштабного коэффициента, принимающего значения от 0 (нулевая освещенность) до 1 (максимальная яркость, которую можно найти на изображении). Таким образом, если в некоторой точке измеренная яркость составляет, скажем, 0,8, то это означает, что данной ориентации поверхности (р, q) на карте отражательной способности соответствует точка на изолинии 0,8.
На рис. 3.76 - 3.79 приведено несколько примеров. На рис. 3.76
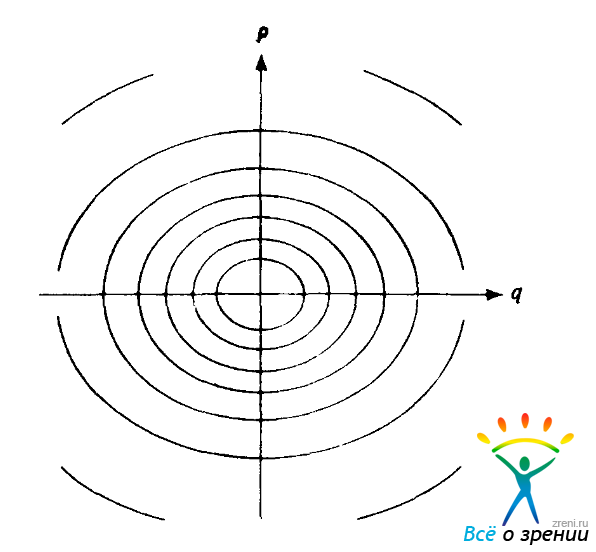
Рис. 3.76. Контуры постоянных значений cos i. Расстояние между контурами составляет 0,1. Эта карта отражательной способности характеризует объекты с ламбертовыми, поверхностями в случае единственного источника света, расположенного вблизи наблюдателя
изображена карта отражательной способности для абсолютно матовой (ламбертовой) поверхности, освещаемой источником, расположенным поблизости от наблюдателя. На рис. 3.77

Рис. 3.77. Контуры постоянных значений cos i. Расстояние между контурами составляет 0,1. Направление, в котором расположен источник, определяется координатами (p,g) = (0,7, 0,3). Эта карта отражательной способности типична для объектов с ламбертовыми поверхностями в случае, когда источник света не располагается вблизи от наблюдателя
представлен случай, когда поверхность — та же самая, но источник света находится в другом месте (его точные координаты р = 0,7, q = 0,3). Обратите внимание на то, что здесь изображена граница тени — линия, соответствующая тем ориентациям поверхности, при которых в случае освещения данным источником поверхность становится самозатеняющейся. На рис. 3.78
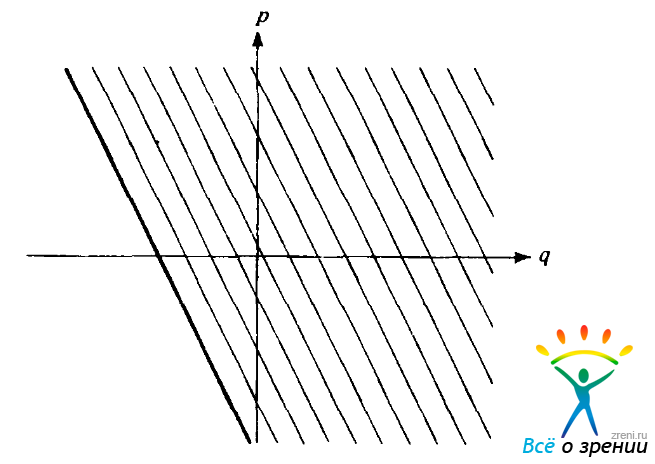
Рис. 3.78. Контуры постоянных значений функции отражательной способности ф (i, е, g) = cos i/cos е. Расстояние между контурами составляет 0,2
представлена характерная карта отражательной способности лунных морей, а на рис. 3.79

Рис. 3.79. Контуры постоянных значений функции отражательной способности ф (i, е, g) = = 0,5s (n + 1)(2 cos / соs е - cosg)n + (1 - s) cos i. Эта карта отражательной способности характеризует поверхность с функцией отражательной способности, являющейся комбинацией двух составляющих, в случае, когда эта поверхность освещается единственным точечным источником. Такая функция отражательной способности может быть порождена глянцевитой белой краской
приведена карта отражательной способности для упоминавшейся нами выше глянцевитой белой краски. Круговые контуры, расположенные очень близко друг от друга, соответствуют значениям яркости, изменяющимся очень быстро при любом изменении ориентации поверхности; таким образом, они обусловлены зеркально отраженным светом. Остальная часть этой карты напоминает карту, приведенную на рис. 3.77, и обусловлена диффузно рассеянным светом.
↑ Восстановление формы объекта по данным о затенении
Задача восстановления формы объекта по данным о затенении даже при введении всех тех упрощающих допущений, которые обеспечивают возможность использовать карту отражательной способности, все еще остается очень трудной. Если яркость известна, то на карте отражательной способности можно выбрать конкретную изолинию; это позволит узнать, что точка, определяющая ориентацию поверхности, расположена, например, на изолинии 0,8, однако пока еще не известно, где именно на ней. До тех пор пока не располагаем дополнительной информацией — каждая точка изолинии столь же хороша, как и любая другая.
Эту задачу тем не менее решить можно. Необходимое дополнительное условие сводится к предположению о гладкости поверхности и гладкости изменения ее ориентации (т. е. к дифференцируемости). В сущности, это означает, что если для некоторой точки изображения известны ориентация поверхности и характер ее локальных изменений, то при перемещении по изображению в некотором направлении, зная новое значение яркости изображения, можно указать новую локальную ориентацию.
Это поразительно, поскольку невозможно предположить, что условие гладкости налагает ограничения, достаточные для того, чтобы получить ответ. Но это действительно так в силу блестящего математического приема, использованного Хорном; к сожалению, я не в состоянии кратко изложить его на нормальном языке. Итак, с математической точки зрения задача разрешима. С биологической точки зрения, однако, такой тип решения, даже с учетом основных упрощений, на которых основывается метод Хорна, все еще слишком сложен, для того чтобы он мог быть использован. В общем случае решение уравнений, обеспечивающих восстановление формы объекта по данным о затенении, для карты отражательной способности требует выполнения последовательного интегрирования по контурам изображения, расположение которых может быть определено лишь в процессе интегрирования. Решение этих уравнений более простым способом при более параллельном выполнении вычислений представляется делом совершенно безнадежным, если только мы не готовы пойти на введение дополнительных ограничений.
Итак, был испробован ряд подходов. Вудем предложил локальный итерационный метод определения ориентации поверхности, основанный на использовании как ограничений, налагаемых на ориентацию поверхности (типа минимизации локальной кривизны), так и ограничений, учитывающих затенение. Брейди предложил вводить также ограничения и на тип поверхности, т. е. ограничиваться, скажем, рассмотрением обобщенных конических поверхностей, и показал, каким образом можно определять направление, в котором расположен источник света.
Я полагаю, однако, что вполне справедливо утверждать следующее: ни один из этих методов не пролил пока особого света на использование информации о затенении в зрительной системе человека. Затруднение, вероятно, состоит в том, что человек использует эту информацию не очень хорошо. Судя по всему, система обработки зрительной информации, имеющаяся у человека, использует грубую информацию о затенении хотя и часто, но не всегда правильно; возможно поэтому, затенением легко пренебрегают в пользу других видов информации. Ситуации, в которых зрительная система человека не всегда работает хорошо, чреваты затруднениями из-за того, что знание математического способа решения задачи может давать очень мало сведений относительно того, каким методом пользуется человек при ее решении. К сожалению, как мы убедимся ниже, то же самое можно сказать и о проблеме цвета. Тем не менее человек действительно в определенной мере использует информацию о затенении, следовательно, в этой проблеме имеется нечто, требующее понимания.
↑ Фотометрическое стереоскопическое изображение
Известен метод восстановления формы объектов по картам отражательной способности, который, вероятно, совершенно не представляет интереса в биологическом смысле, но столь элегантен, что я не могу преодолеть искушения упомянуть его. Идея метода была предложена Вудемом и затем развита Хорном, Вудемом и Силвером. Метод состоит в следующем. Пусть заданы некоторое изображение и карта отражательной способности для одного положения источника света. Допустим, что измерена яркость изображения в какой-то одной точке. Как мы убедились, теперь можно установить, что точка, определяющая соответствующую ориентацию поверхности, расположена на некоторой конкретной изолинии пространства градиентов (выше в качестве примера приводилась изолиния 0,8, воспроизведенная на рис. 3.80, в).
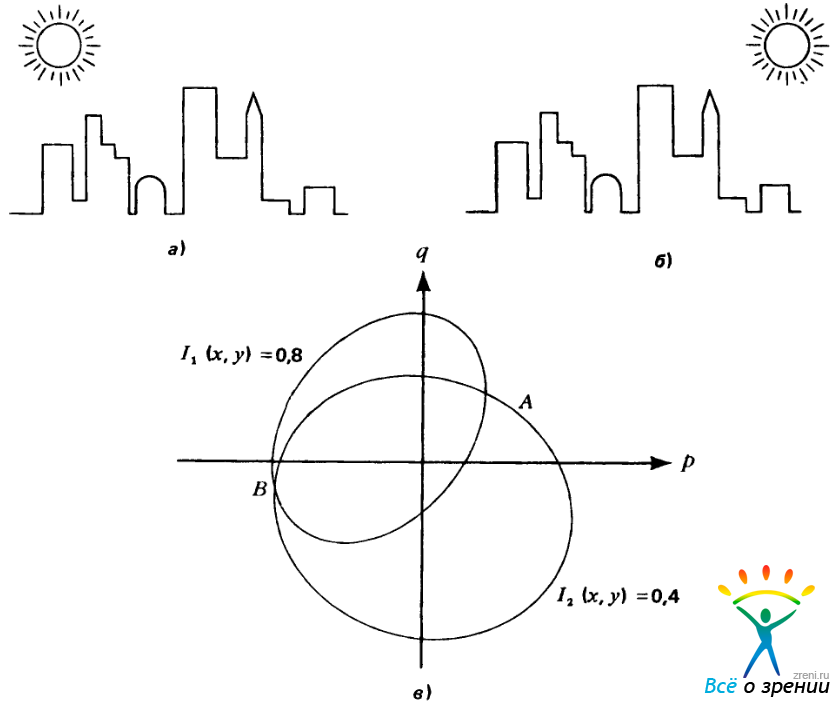
Рис. 3.80. Иллюстрация идеи, лежащей в основе фотометрической стереоскопии. Берутся изображения I1 и I2 одной и той же сцены, соответствующие различным условиям освещения, и используются две различные карты отражательной способности. Измерение яркостей в некоторой точке на обоих изображениях может привести к тому, что этой точке первого изображения будет поставлена в соответствие изолиния 0,8 (a), а этой же точке второго изображения - изолиния 0,4 (б). Следовательно, истинную ориентацию поверхности (р, g) определяет одна из точек пересечения изолиний, т. е. точка А или В (в)
Задача заключается в том, что нам неизвестно, какая именно точка изолинии задает правильную ориентацию поверхности (р, q).
Допустим далее, что мы изменяем положение источника света (либо, если речь идет о сцене на открытом воздухе, делаем паузу в несколько часов), после чего с той же самой точки наблюдения получаем второе изображение. Геометрические свойства поверхности относительно наблюдателя остаются неизменными, однако карта отражательной способности изменяется. Так, например, изменившаяся ситуация может приобрести вид, приведенный на рис. 3.80, б, и измерение яркости в той же самой точке изображения переносит нас на изолинию 0,4 карты отражательной способности, как это показано на рис. 3.80, в. Таким образом, определение истинной ориентации поверхности сводится к выбору одной из двух возможностей: двух точек пересечения первой изолинии 0,8 и второй изолинии 0,4 - точек А и В на рис. 3.80, в. В сущности, это уже и есть решение задачи, поскольку выбор одной из точек А и В может быть легко осуществлен на основе информации о непрерывности или с помощью третьего изображения, соответствующего еще одному положению источника света.
Схема такого типа может найти практическое применение, так как обычно можно построить карту отражательной способности даже для сложных условий освещения, хотя обычно ее приходится строить, опираясь на результаты реальных измерений: вычислительная процедура синтеза такой карты сложна. При условии, что освещение и характеристики поверхности в пределах схемы не изменяются, фактором, определяющим яркость изображения, является ориентация поверхности.
----
Статья из книги: Зрение | Д. Марр

Комментариев 0