Техническое зрение роботов. Пью А.


Автор: Пью
Год: 1987
Издательство: Машиностроение
Формат: DjVu
Качество: Сканированная книга
Количество страниц: 320
Содержание статьи:
Описание
Книга под редакцией английского профессора А. Пью открывает новую серию издательства ”ИФС пабликейшнз”, Великобритания, по наиболее актуальным вопросам современной технологии. Описана обработка изображений в робототехнических системах. В качестве примеров рассмотрены визуально управляемые сварочные и простейшие сборочные процессы. Информационный характер носят статьи по сортировке отливок, управлению роботом-маляром и др. Книга дает представление о последних достижениях визуальной адаптации промышленных роботов, что создает успешные предпосылки для создания гибких производственных комплексов.
Для инженеров-технологов и специалистов, занятых автоматизацией технологических процессов в различных отраслях народного хозяйства.
↑ Содержание
Предисловие редактора перевода
Предисловие редактора
Глава 1. Обзорные статьи
Робототехника второго поколения. А. Пью
Техническое зрение в промышленности Л. Россол
Глава 2. Техника обработки визуальной информации
Обработка бинарных изображений. П.В. Китчин, А.Пью
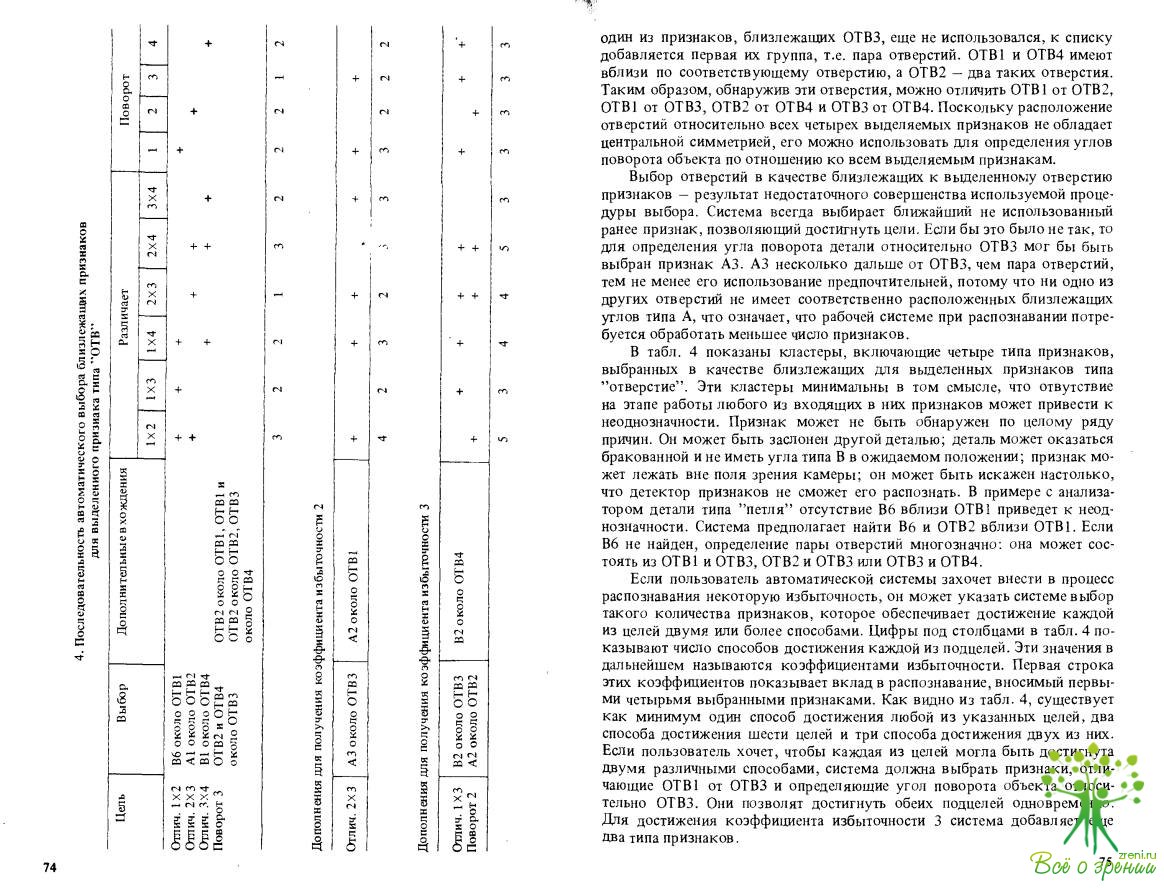
Поиск и распознавание частично видимых объектов: метод выделения локальных признаков. Р.С. Болле, Р.А. Кэйн
Интеграция системы распознавания деталей и промышленного робота. Г. Нер, П. Мартини
Оценка производительности СТЗ. С.А. Розен, Дж. Дж. Глисон
Глава 3. Исследования в области технического зрения
Адаптивное визуальное управление роботами. А. С. Сандерсон, Л.И. Вейсе
Использование телевизионной системы в замкнутой системе позиционного управления механизмами. П.И. Кулон, М. Ногарэ
Гибкая СТЗ. О.Д. Фожера, Ф. Жермен, Г. Кризе, Ж.Д. Буасонна, М. Гербер, Ж. Понс, Э. Пошон, Н. Айяш
Использование конического светового потока для распознавания объектов. Дай Вэй, М. Джини
Глава 4. Разработки в области управления дуговой сваркой
Современные методы использования анализаторов изображения для управления роботами в промышленности. Ф. Виллерс
Анализатор визуальной информации для сварочных роботов. Т. Бомба, X. Маруяма, Э. Оно, Я. Сига
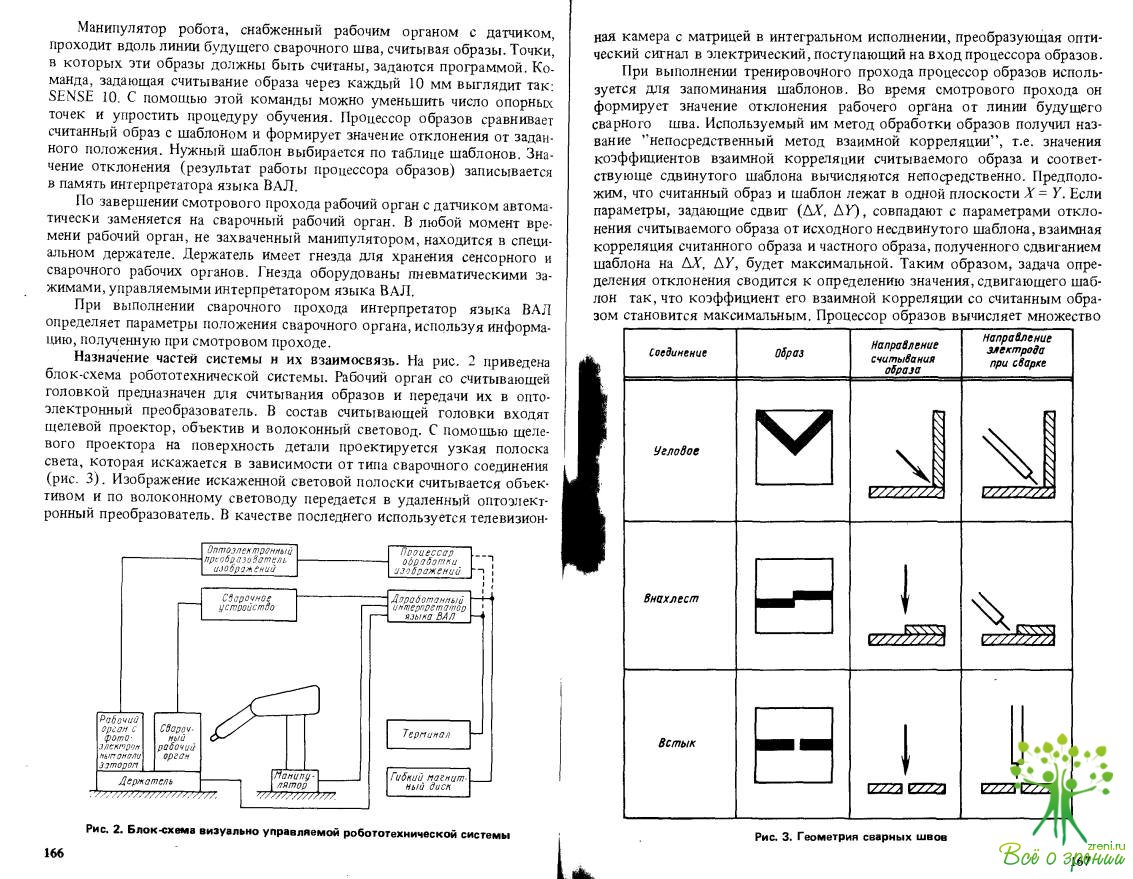
Робототехническая система дуговой сварки,управляемая на основе анализа визуальной информации. И. Масаки
Современные методы использования визуальной обратной связи при дуговой сварке тонких стальных листов. В.Ф. Клоксин, П.Г. Дэви, С.Г. Морган, А.Р. Вайдлер
Глава 5. Автоматическая сборка и подача деталей иа обработку
Интеллектуальный робот-сборщик. М. Коно, X. Хорино, М. Исобэ
Визуальное управление простыми сборочными операциями. П. Сарага, Б.М. Джонс
Робототехническая система, извлекающая цилиндрические детали из бункеров. Р.Б. Келли, Дж. Р. Бирк, Г.А.С. Мартинс, Р. Телла
Гибкий сборочный модуль с визуально управляемым устройством подачи деталей. У,Б. Хегинботам, Д.Ф. Барнс, Д.Р. Пэрдью, Д. Дж. Ло
Глава 6. Промышленное использование СТЗ
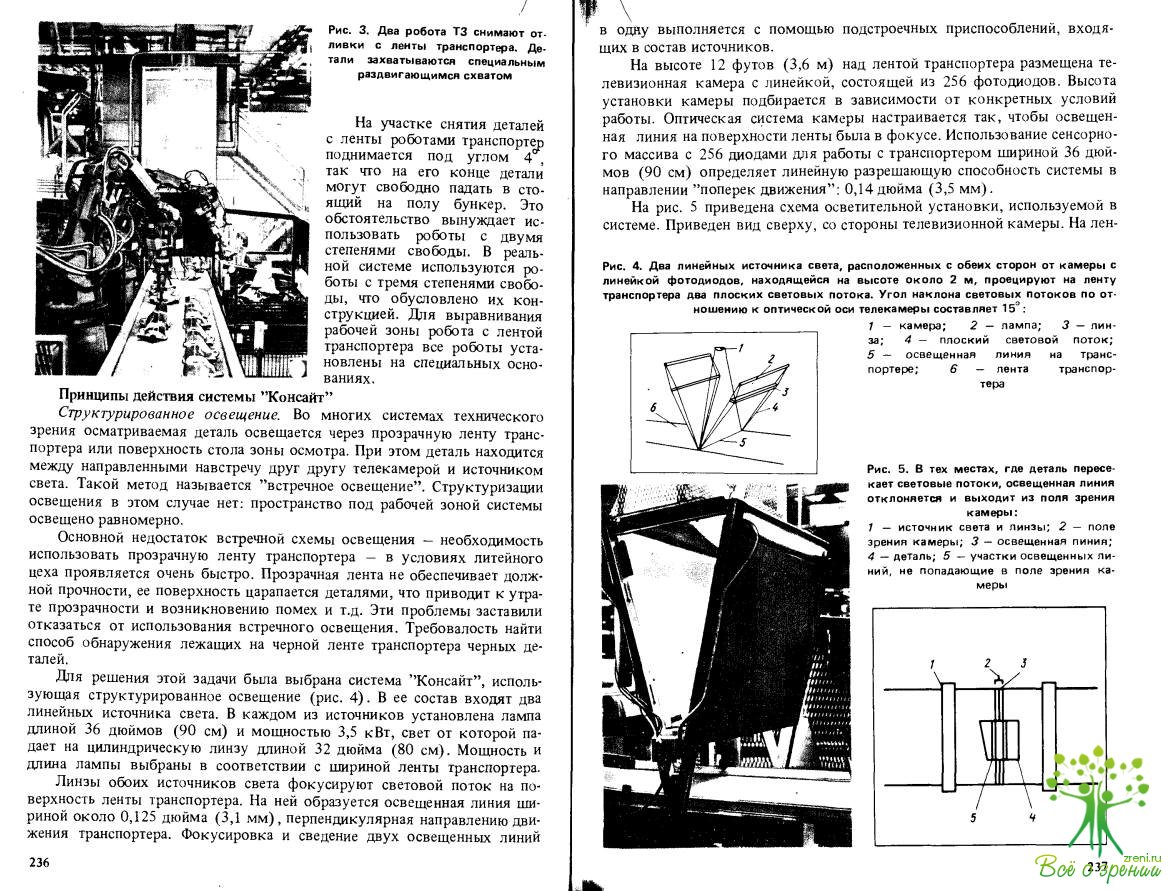
Сортировка отливок с помощью СТЗ на заводах фирмы "Дженерал Моторс" в Канаде, Р.Д. Бауман, Ж.А. Вильмхерст
[banner_centerrs]
{banner_centerrs}
[/banner_centerrs]
Использование методов распознавания образов в условиях промышленного производства. Ж.-П. Герман и др
Устройства окраски с управлением от телевизионной системы Б. Джонстон
Робототехника в кузнечном производстве. Р. Кэлли, Дж. Бирк, Дж. Дессимо, X. Мартинс, Р. Телла
Автоматическое украшение шоколадной продукции с использованием технического зрения робота. А. Дж. Крон шоу
Глава 7. Серийно выпускаемые СТЗ роботов
Система технического зрения ОМУ. П.Ф. Хьюкин, X. Дж. Фукс
Система технического зрения робота ПУМА/ К5-100. Б. Карлайсл С. Рот, Дж. Глисон, Д. Мак-Ги
Оптоэлектронный анализатор визуальной информации в составе гибкой сборочной производственной системы. В. Брюн, К. Биттер
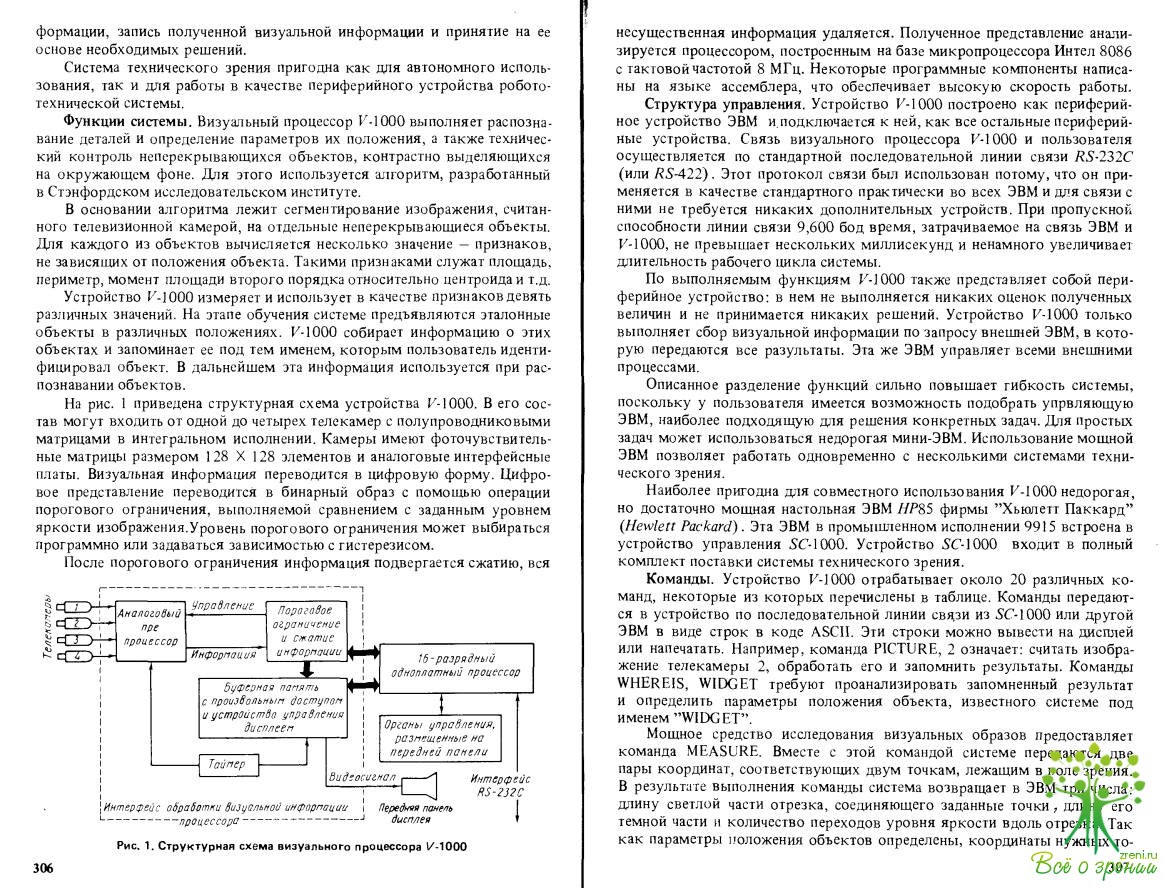
Система технического зрения с разделением сбора и обработки информации. Дж.И. Робертсон
Система полутонового технического зрения фирмы "Вестингауз", предназначенная для управления и контроля в реальном масштабе времени. А.Г. Маклин,Г.Е. Тинсдейл
Список дополнительной литературы
↑ Предисловие редактора перевода
Современный опыт использования робототехнических систем в промышленности свидетельствует о необходимости дальнейшего развития интеллектуальных и сенсорных возможностей роботов. Ни у кого не вызывает сомнения, что роботы раскроют все свои возможности только с применением средств очувствления, центральное место среди которых занимает техническое зрение. В области технического зрения в последнее время достигнуты большие успехи, и сейчас специалистам хорошо известны преимущества и особенности робототехнических систем, снабженных техническим зрением. Являясь, несомненно, технологией будущего, системы технического зрения (СТЗ) находят тем не менее уже сейчас определенное применение в производственных системах. Оснащение роботов системами технического зрения обеспечивает существенное расширение их технологических и функциональных возможностей. Восприятие и обработка визуальной информации о текущем состоянии технологического процесса, об относительном расположении и ориентации схвата робота и объектов манипулирования позволяет автоматизировать такие операции, как сварка, сборка, окраска, сортировка и др. Основные функции СТЗ в работе систем управления промышленными роботами сводятся к локации рабочего пространства, распознаванию образов, измерению статических и динамических характеристик различных объектов и т.д. Необходимо отметить также, что автоматический контроль выпускаемых изделий с помощью СТЗ позволяет освободить операторов от монотонной и утомительной работы.
Как известно, зрение - это способность формировать описание объектов по их изображениям. Техническая реализация этой способности затруднена из-за того, что преобразования, с помощью которых объекты отображаются в виде зрительных образов, сводятся к выделению отдельных их свойств, т.е. к получению информации о форме объекта, поверхностном отражении, текстуре, цвете, движении и др. Поэтому в процессе анализа объекта необходимо определить его компоненты и затем при описании объекта представить его с помощью основных физических характеристик, которые называются базовыми компонентами изображения. Таким образом, техническое зрение есть процесс выработки рациональных символических описаний визуальной обстановки, составленных на основе анализа данных об изображении.
Все операции по анализу изображений выполняются с помощью разнообразных видеодатчиков, специальных источников структуризован-ного освещения и современных вычислительных средств, снабженных соответствующим программным обеспечением.
В настоящее время, когда в промышленности уже начинают эффективно применяться некоторые упрощенные СТЗ, исследователи продолжают интенсивные поиски рационального решения этой проблемы. Существующие системы распознают, как правило, сравнительно небольшое количество объектов, расположенных вполне определенным образом. Существенным ограничением этих систем является также их невысокое быстродействие.
В перспективных разработках в области СТЗ основное внимание уделяется расширению функциональных возможностей, повышению быстродействия и гибкости системы, а также миниатюризации и стандартизации. Предполагается использование пассивных и активных стереоскопических систем восприятия объемной информации о трехмерных сценах с использованием различных управляемых типов структуризован-ного освещения. Эти системы ориентируются на мощные языки программирования высокого уровня.
Рядом специалистов высказывается мнение, что информационные возможности СТЗ выходят далеко за рамки функциональных возможностей промышленных роботов и они могут самостоятельно использоваться в различных типах гибких производственных процессов.
Предлагаемая советскому читателю книга написана группой ведущих зарубежных специалистов в области технического зрения. По своему содержанию и направленности эта книга занимает особое место среди других книг, посвященных данной тематике. Прежде всего необходимо отметить многосторонний охват вопросов, относящихся к техническому зрению роботов. В ней изложены сведения, относящиеся к элементной базе, различным техническим устройствам, входящим в СТЗ, а также сведения, касающиеся новых принципов обработки и распознавания визуальной информации. Эти системные вопросы в таком виде и объеме впервые изложены в подобном издании.
Основу книги составляют описания СТЗ, опубликованные ранее в различных технических журналах и трудах конференций. Приводимая здесь информация (с учетом приложения, составленного редактором перевода и включающего дополнительную библиографию отечественных авторов) позволяет получить достаточно полное представление о разработках СТЗ на современном этапе развития этой области техники.
Рассмотрение СТЗ, осуществляющих различные виды обработки визуальной информации, их возможных структур построения и различного использования проведено с учетом упомянутых выше принципиально качественных изменений, возможных при построении таких систем на основе новейших элементов, средств структуризованного освещения, современных вычислительных средств и эффективного программного обеспечения. Рассмотренные в книге разнообразные примеры применения таких систем расширяют представления об их возможностях.
В разделах книги, относящихся к построению различных систем и способам анализа визуальной информации, представлены некоторые новые общие концепции построения систем этого класса. В книге показано, что роль СТЗ не ограничивается простой заменой действующих систем, а открывает совершенно новые, не существовавшие ранее функциональные возможности робототехнических систем.
Большой фактический материал, относящийся к построению различных систем, элементной базе, схемам и их характеристикам, придает определенную ценность книге как справочному пособию по СТЗ.
В этом кратком предисловии не стоит давать исчерпывающую оценку книги, тем более заниматься ее подробным критическим разбором. Хотелось бы лишь отметить, что она несомненно будет с интересом прочитана представителями многих научных и инженерных специальностей, чему немало способствуют легкий и ясный способ изложения, оригинальность подходов, единая концепция, богатый набор простых для понимания примеров.
Материал изложен на инженерном уровне и несмотря на то, что некоторые фактические данные (относящиеся, например, к параметрам некоторых элементов оборудования) к моменту выхода из печати этой книги уже несколько устарели, она представляет несомненную ценность для специалистов в области технического зрения роботов и робототехники.
Книга рассчитана на широкий круг читателей. Можно надеяться, что ее с интересом прочтут разработчики робототехнических систем, технологи соответствующих Производств, конструкторы робототехнического оборудования, студенты высших учебных заведений. Для тех, кто применяет системы технического зрения, полезными будут сведения об их конкретных оригинальных реализациях и соответствующих характеристиках.
Проф. Г.П. Катыс
↑ Предисловие редактора
В последнее время проблемы связанные с созданием технического зрения роботов выделились в самостоятельную область робототехники, имеющую свои специфические особенности. По-видимому, первым значительным изданием, посвященным техническому зрению роботов, является книга ’’Computer Vision and Sensor-Based Robots”, Plenum Press, 1979, под редакцией Додда (G.G. Dodd) и Россола (L. Rossol). В ней представлены материалы симпозиума по техническому зрению и сенсорным устройствам роботов, проведенного исследовательской лабораторией фирмы ’’Дженерал Моторе” (General Motors) в Уоррене, штат Мичиган, США, в 1978 г.
Техническое зрение роботов и их сенсорные устройства явились темой международной конференции, проведенной в Стратфорде, Англия, в мае 1981 г. В ноябре 1982 г. состоялась вторая конференция в Штутгарте, ФРГ. Большое число представителей, которых собрала эта конференция и вполне понятный интерес специалистов к проблемам технического зрения роботов послужили основными стимулами опубликования этого сборника статей.
Исследователи и пользователи, впервые сталкивающиеся с проблемами зрения роботов, обнаруживают, что существует достаточно много публикаций, посвященных различным аспектам машинного зрения. Часть этих публикаций составляют работы, касающиеся непосредственно СТЗ роботов. Границы этой области, лежащей на стыке различных приложений машинного зрения, не так просто определить. Даже опытные специалисты иногда затрудняются провести четкую грань между автоматизированным техническим контролем и техническим зрением роботов.
Авторы настоящего сборника - ученые и специалисты промышленности, которые внесли ощутимый вклад в развитие СТЗ роботов, а вошедшие в сборник статьи (частично уже ранее опубликованные) являются их наиболее представительными работами в данной области. Цель книги - собрать воедино наиболее значительные труды исследователей различных аспектов проблемы технического зрения роботов и сформировать ’’ядро знаний”, дающее представление о сегодняшнем состоянии дел в этой отрасли робототехники.
Первые две статьи составляют вводный обзор, подготавливающий читателя к восприятию последующих работ. Остальные статьи посвящены различным вопросам использования технического зрения в робототехнике и существующим в настоящее время промышленным СТЗ. Такими вопросами являются, например, создание удовлетворительных зрительных сенсоров, освещение рабочей зоны, разработка эффективного программного обеспечения. Решение этих вопросов дает ключ к успешной реализации СТЗ робота. Возможно, наиболее ясно это положение иллюстрируют исследования по созданию систем управления автоматической сваркой - именно для этого приложения наиболее очевидны выгоды от применения методов СТЗ. В автоматизации сборочных работ использование СТЗ тоже должно сыграть весьма существенную роль, дополняя применение захватов, оборудованных тактильными датчиками. При поиске и ориентации собираемых компонентов использование СТЗ становится основным приемом. Необходимо отметить, что существующие СТЗ в большинстве предназначены для быстрого предварительного анализа рабочего поля и не всегда обеспечивают точность, необходимую для выполнения автоматического технического контроля объектов. В связи с этим надо четко разграничивать две задачи: общий анализ рабочего поля и контроль объектов, расположенных в этом поле.
Прочитав обзор содержания этой книги, читатель, конечно, убедится в том, что СТЗ роботов и их применение в робототехнике еще не вышли из младенческого возраста. Специалисты, занимающиеся рассматриваемыми вопросами на протяжении десяти последних лет, знают, что развитие технического зрения роботов стимулируется прикладными технологическими задачами. Это придает деятельности в области создания СТЗ роботов особую увлекательность и открывает широкий простор для поиска. Чтобы второе поколение промышленных роботов стало реальностью, необходимо искать наилучшие способы применения разнообразных сенсоров, становящихся в настоящее время неотъемлемой частью робототехнических систем.
Редактор выражает признательность всем авторам этой книги. Особая благодарность приносится доктору Руксу (B.W. Rooks), за помощь в обеспечении взаимоотношений авторов и редакции.
Сентябрь 1982 г. Алан Пью, г. Гулль
Снимки (скриншоты) книги
Купить или скачать книгу

Все файлы на сайте, прежде чем выкладываются, проверяются на вирусы. Поэтому мы даем 100% гарантию чистоты файлов.

Комментариев 0