Представление форм объектов при распознавании ? Часть 1


Содержание:
Описание
↑ Введение
Мы приступаем к заключительному и, возможно, самому замечательному из разделов нашей программы — преобразованию представлений форм объектов, ориентированных на процессы восприятия, в представления форм объектов, удобные для использования в процессах распознавания. При этом возникает много проблем, требующих исследования. В данной главе, написанной главным образом по материалам работы, затрагиваются лишь некоторые из них, причем в самой ограниченной степени. Тем не менее принципиальные положения иногда наиболее четко выявляются при схематическом изложении, и основное внимание здесь будет посвящено тому, что именно предопределяет пригодность представления для его использования в дальнейшем при распознавании. В связи с этим нам придется заняться обсуждением того, что представляет собой распознавание и как оно происходит.
Наиболее важным в данном случае является то, что нам теперь придется отказаться от удовольствия использовать систему координат наблюдателя, на применении которой основывались все представления, до сих пор рассматривавшиеся, из-за неразрывной связи таких представлений с процессами формирования изображения. Для распознавания объекта необходимо устойчивое описание его формы, которое если и зависит от положения наблюдателя, то лишь в очень небольшой степени. Это, в свою очередь, означает, что элементы формы объекта и способы их соединения должны описываться не применительно к положению наблюдателя, а в системе координат, в основе которой лежит собственно форма. Замечательным следствием этого условия служит то, что каноническая система координат должна быть задана на объекте до того, как будет описана его форма, причем, по-видимому, не существует способа обойти это требование. Для некоторых форм объектов, скажем формы сигары, это сделать нетрудно, для других же, например ’’формы” скомканной газеты, — нелегко.
Итак, перейдем к детальному рассмотрению этих проблем. Я буду пользоваться термином форма для обозначения геометрической организации поверхности физического тела. Так, две статуи лошади, отлитые с помощью одной и той же литейной формы, имеют одинаковую форму. Представление формы — это некоторая формальная схема, предназначенная для описания формы объекта или ее отдельных аспектов, в сочетании с правилами, указывающими порядок применения этой схемы при представлении формы любого конкретного объекта. Я буду называть описанием формы в соответствующем представлении результат применения этого представления к заданному объекту. Такое описание может характеризовать форму объекта как приближенно, так и во всех подробностях.
↑ Проблемы, возникающие в связи с представлением формы
Известно много видов информации, получаемой зрительным путем и играющей важную роль в задачах распознавания и разделения объектов. В их числе особое место занимает информация о форме объекта, так как в отличие от информации о цвете и зрительных текстурах для представления большинства видов информации о форме объекта необходимо использовать какую-либо систему координат, позволяющую описывать пространственные отношения. Так, например, информация, позволяющая различать по форме фигурки животных, приведенные на рис. 5.1,
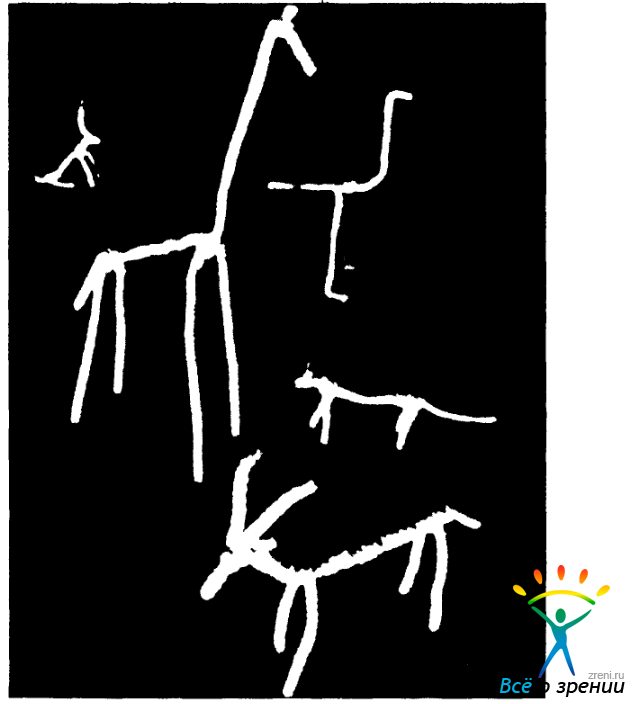
Рис. 5.1. Эти фигурки, составленные из частей щеточек для чистки трубок, иллюстрирует несколько положений, развиваемых в данной главе Представленные формы объекта для получения описания, подходящего для использования при распознавании, не должно воспроизводить форму поверхностей объекта. Как следует из данного рисунка, формы тел животных удается вполне эффективно отобразить с помощью соответствующего подбора пространственного расположения и относительных размеров небольшого числа кусочков щеточек Простота этих описаний объясняется соответствием, имеющим место между изображенными на рисунке кусочками щеточек и естественными (каноническими) осями форм описываемых объектов Представление формы объекта для использования при распознавании должно иметь в своей основе характеристики, которые однозначно определяются соответствующей формой и могут быть надежно найдены по изображениям соответствующего объекта
заключена в пространственном расположении, ориентации и длине частей щеточек для чистки трубок, из которых эти фигурки сделаны. Аналогичным образом, поскольку левая и правая руки зеркально симметричны друг относительно друга, для того, чтобы описание формы руки позволяло устанавливать, относится ли оно к левой или к правой руке, оно должно тем или иным способом определять взаимные расположения большого и указательного пальцев.
Критерии эффективности представления формы объекта
Форма объекта характеризуется рядом совершенно различных аспектов, причем одни из них играют в распознавании более значительную роль, чем другие, и один и тот же аспект может быть описан рядом различных способов. Хотя самую общую классификацию представлений форм объектов построить трудно, можно попытаться сформулировать основные критерии для оценивания этих представлений и определить основные возможности выбора, который необходимо производить при формировании представления формы объекта.
Доступность, удобство получения и использования описания
Можно ли по изображению получить искомое описание и можно ли сделать это ценой разумных затрат? Информация, которую можно получить из изображения, подвержена фундаментальным ограничениям(например, связанным с четкостью изображения), и поэтому требования, предъявляемые к описанию, должны укладываться в пределы возможного. Кроме того, описание, которое в принципе можно построить по изображению, иногда тем не менее оказывается все же неприемлемым из-за недопустимо больших затрат памяти и времени, необходимых для его получения.
Допустимое разнообразие описаний и их однозначность
Для какого класса форм объектов предназначается представление и получают ли эти формы канонические описания в соответствующем представлении? Так, например, представление формы, предназначенное для описания плоских поверхностей и сопряжений перпендикулярных плоскостей, позволяет представлять кубические твердые тела, однако не годится для описания биллиардного шара или расчески. Если представление предназначено для использования при распознавании, то соответствующее описание формы объекта должно быть однозначным. В противном случае на одном из этапов процесса распознавания возникает трудная задача, связанная с определением того, относятся ли два описания к одной и той же форме объекта. Если, например, для представления формы решено использовать многочлены n-й степени, то формальное описание некоторой заданной поверхности будет зависеть от выбора системы координат. Поскольку маловероятно, что мы будем использовать одну и ту же систему координат в двух разных случаях, не вводя каких-то дополнительных условий, то даже одно и то же изображение поверхности может порождать совершенно разные описания.
Другой пример относится к представлению формы объекта с помощью большого числа маленьких кубиков, укладываемых таким образом, чтобы обеспечивалось максимально точное приближение искомой формы. Если размеры кубиков достаточно малы, то форму объекта можно воспроизвести с их помощью с большой точностью, и, следовательно, возможности такого представления весьма обширны. С другой стороны, даже небольшое смещение, скажем на половину длины ребра 3-мм ”мини-куба”, может привести к существенному изменению представления формы объекта, что нарушает, таким образом, условие однозначности. Если же использовать 30-см кубики, то проблема однозначности в значительной мере снимается (для представления тела человека достаточно всего шести таких кубиков, поставленных друг на друга), однако происходит это за счет возникновения существенных проблем в связи с другими аспектами представления.
Устойчивость и чувствительность
За пределами критериев допустимого разнообразия и однозначности представления остаются проблемы, связанные с непрерывностью и разрешающей способностью представления. Для использования подобия форм двух объектов при распознавании оно должно быть отражено в их описаниях, однако в то же время в них должны отражаться даже и наиболее трудноуловимые различия данных форм. Эти противоположные требования можно выполнить лишь в том случае, если имеется возможность разделить информацию, характеризующую самые общие и в наименьшей степени подверженные изменениям свойства, и информацию, характеризующую наиболее тонкие отличия форм (т. е. чувствительную к этим различиям).
Рассмотрим в качестве примера представление в виде фигурки, составленной из кусочков щеточек для чистки трубок. В этом представлении для описания формы тела животного в качестве непроизводных элементов используются расположение в трехмерном пространстве и относительные размеры кусочков щеточек (см. рис. 5.1). Выбор размеров этих кусочков является средством управления устойчивостью и чувствительностью получаемого в результате описания фигурки из кусочков щеточек. Устойчивость обеспечивается благодаря использованию кусочков больших размеров; использование всего лишь одной щеточки обеспечивает наиболее устойчивое описание формы в целом, характеризуя лишь размеры и ориентацию объекта. Однако описание, составленное из кусочков меньших размеров, будет обладать чувствительностью к деталям меньших размеров, имеющим более локальный характер, скажем таким, как крайние части конечностей животных. Хотя подобные детали в меньшей степени проявляют тенденцию к устойчивости, они тем не менее могут оказаться важными при выделении тонких различий между сходными формами объектов.
Решения, которые необходимо принять при построении представления формы объекта
Теперь мы в состоянии связать результаты, относящиеся к выбору того или иного способа представления формы объекта, с тремя только что введенными критериями качества представления. Не будет лишним повторить еще раз, что самым фундаментальным свойством представления является возможность с его помощью перевести в явную форму некоторые виды информации и что это свойство представления можно использовать для подчеркивания существенной информации, обеспечивая тем самым возможность ограничиваться менее объемными и легче поддающимися обработке описаниями. Нами будут рассмотрены три проблемы, возникающие при формировании представления:
1)система координат представления;
2) непроизводные элементы представления, являющиеся основными элементами информации о форме объекта, используемыми в представлении;
3) организация, придаваемая соответствующим представлением информации в результате формирования ее описаний.
Системы координат
Наиболее важной особенностью системы координат, используемой для получения представления, является способ задания этой системы. Если координаты задаются относительно положения наблюдателя, то мы говорим, что в представлении используется система координат, привязанная к наблюдателю. Если местоположение задается в системе координат, определенной на наблюдаемом объекте, то это означает, что в соответствующем представлении используется система координат, привязанная к объекту наблюдения. Существует, естественно, несколько вариантов систем координат обоих типов.
При решении задач распознавания описания, ориентированные на наблюдателя, легче получать, но труднее использовать, чем описания, ориентированные на объект наблюдения, поскольку первые зависят от той точки наблюдения, применительно к которой они построены. В результате в любой теории распознавания, основанной на использовании представления, привязанного к наблюдателю, различные виды объекта должны, в сущности, рассматриваться как различные объекты. Таким образом, этот подход потенциально требует большого объема памяти для размещения описаний, что компенсируется сокращением объема и сложности вычислений, необходимых для учета эффектов перспективы.
Минский предложил сокращать число таких описаний с помощью соответствующего, подлежащих запоминанию. Очевидно, что при определенных обстоятельствах этот подход позволяет получать очень хорошие результаты. Допустим, например, что белкам нужно отличать деревья от других объектов, но не нужно идентифицировать конкретные породы деревьев по их форме. В таком случае они могли бы обладать способностью обращать внимание на некоторые общие характеристики облика вертикального ствола дерева, растущего неподалеку, которые не зависят от положения точки наблюдения. В представлении, основанном на таких характеристиках, все деревья, растущие в среде обитания белки, будут иметь, по существу, одинаковые описания.
В более сложных задачах распознавания, в которых учитывается пространственное расположение его компонентов, любое представление, привязанное к наблюдателю, будет, вероятно, чувствительно к ориентации объекта. Рассмотрим, например, как зависит вид руки человека от ее ориентации даже в том случае, когда положения большого и остальных пальцев взаимно фиксированы. При необходимости различать левую и правую руки, используя представление, привязанное к наблюдателю, эту задачу придется разбить на ряд частных случаев, каждый из которых должен соответствовать какому-либо конкретному виду руки.
Альтернативой полному перебору всех допустимых видов рук являются использование какой-либо из систем координат, привязанных к объекту наблюдения, и переход в результате к построению некоторого канонического описания, не зависящего от расположения точки наблюдения. Было бы идеально, если бы для распознавания объекта даже при неизвестных положениях точки наблюдения, требовалось хранить в памяти лишь по одному описанию пространственной структуры каждого объекта. Однако описание, привязанное к объекту, труднее получать, поскольку для каждого объекта приходится задавать собственную систему координат и, как уже упоминалось выше, эта система координат должна быть идентифицирована по изображению до построения описания.
Непроизводные элементы
[banner_centerrs]
{banner_centerrs}
[/banner_centerrs]
Непроизводными элементами представления служат наиболее элементарные составляющие информации о форме объекта, доступные на уровне представления и являющиеся тем видом информации, которую представление получает от процессов обработки информации, действующих на более ранних этапах работы зрительной системы. Так, 2,5-мерный эскиз является примером представления, непроизводные элементы которого содержат информацию о локальной ориентации поверхности и расстоянии (относительно наблюдателя) в тысячах точек зрительного поля. Можно выделить два качества непроизводных элементов представления: тип информации о форме объекта, которую они содержат, что важно с точки зрения доступности, удобства получения и использования описаний, и размеры непроизводных элементов, существенные с точки зрения проблем устойчивости и чувствительности.
Известны два основных класса непроизводных элементов формы объекта — поверхностные (двухмерные) и объемные (трехмерные). Как мы уже убедились, информация о поверхностях в большей степени поддается непосредственному извлечению из изображения. Самые простые непроизводные элементы, которые целесообразно использовать для описания поверхностей, определяют лишь расположение и размеры небольших частей поверхности. Более сложные поверхностные непроизводные элементы, подобные используемым в 2,5-мерном эскизе, могут также включать информацию об ориентации и глубине.
В свою очередь, объемные непроизводные элементы содержат информацию о пространственном распределении формы объекта. Этот тип информации в большей степени соответствует требованиям распознавания формы объекта, чем информация, характеризующая структуру его поверхности, и ее использование часто приводит к тому, что критерию устойчивости удовлетворяют существенно более короткие и, следовательно, более устойчивые описания. Простейший объемный непроизводный элемент определяет лишь расположение и размеры и соответствует приближенно сферической области пространства. Добавив к этим данным векторную величину, можно приближенно задать некоторую цилиндрическую область, причем длина соответствующего цилиндра указывается длиной вектора, а его диаметр — размерами непроизводного элемента. Введение второй векторной величины позволяет задавать вращение относительно первого вектора, что дает возможность определять некоторую область подушкообразной формы, поперечное сечение которой в направлении первого вектора оказывается толще в направлении второго. Еще одна векторная величина может быть введена для задания направления и значения кривизны оси цилиндрической области.
Сложность непроизводных элементов, используемых в представлении, ограничивается главным образом типом той информации, надежное получение которой обеспечивают процессы, предшествующие построению представления. Хотя информационную емкость непроизводных элементов можно увеличивать произвольно, существует предел, дальше которого в этом увеличении заходить бесполезно, поскольку чрезмерная детализация непроизводных элементов приводит к усложнению обеспечения непротиворечивости при их получении с помощью упоминавшихся процессов, действующих на более ранних этапах обработки информации в зрительной системе. В предельном случае описания, входящие в представление формы объекта, состоят из единственного непроизводного элемента. Такое представление будет удовлетворять условиям однозначности и устойчивости лишь в том случае, если при получении с помощью указанных процессов информации, содержащейся в непроизводном элементе, было обеспечено соблюдение непротиворечивости. Однако в таком случае эти процессы при определении непроизводного элемента должны были уже решить задачу распознавания формы объекта, и в результате отпала бы нужда в построении представления.
Размеры — это еще один фактор, влияющий на то, какую информацию непроизводный элемент представления должен перевести в явную форму. В частности, информацию о признаках, превышающих по размеру заданные непроизводные элементы, трудно использовать, поскольку она представлена лишь неявно в конфигурации, состоящей из большого числа меньших элементов. Рассмотрим, например, как можно было бы описать руку (от плеча до кисти) в рамках формы тела человека с помощью представления поверхности типа 2,5-мерного эскиза. В данном случае представление — это, в сущности, то, что получается, если покрыть некоторую поверхность рыбьими чешуйками, — каждая из них при этом задает собственную локальную ориентацию поверхности. Поскольку имеется информация лишь о небольших участках поверхности, то для того, чтобы придать неявно присутствующей форме руки явный вид, необходимо провести достаточно сложный анализ большой совокупности этих малых участков. В случае же использования представления в виде фигурки из палочек для задания формы руки в явном виде достаточно всего лишь одного непроизводного элемента — палочки соответствующего размера. Все сказанное в равной степени можно отнести и к схеме представления, основанной на использовании маленьких кубиков, которую мы обсуждали выше: из этого представления нельзя непосредственно получать информацию об элементах формы большего (чем в нем используется) размера.
На другом конце шкалы размеров признаки формы, размеры которых много меньше размеров непроизводных элементов, используемых для ее описания, не просто труднодоступны — они вообще отсутствуют в описании. Так, скажем, пальцы человека невозможно представить в описании фигуры из палочек, использующем лишь такие непроизводные элементы, размеры которых по порядку соответствуют размерам рук и ног. Если же воспользоваться 30-см кубиками, то не удастся описать в явном виде даже руки и ноги. Аналогичным образом в таком представлении нельзя воспроизвести в явном виде детали поверхности, размеры которых оказываются существенно меньше размеров основных поверхностных непроизводных элементов, используемых в 2,5-мерном эскизе. Таким образом, размеры непроизводных элементов, используемых в описании, в значительной степени определят то, какая информация переводится при представлении в явную форму, какая информация имеется, но недоступна непосредственно и какая информация опускается.
Организация
Третья проблема, возникающая при формировании представления, связана с характером организации информации о форме, которая придается этой информации с помощью представления. В простейшем случае представление не вносит никакой организации и статус всех элементов описания одинаков. Одним из примеров такой ситуации служит локальное представление поверхности, которое обеспечивает 2,5-мерный эскиз; вторым является наша батарея мини-кубиков, приближенно представляющая форму трехмерного объекта.
Непроизводные элементы описания могут быть также объединены в модули, состоящие, например, из смежных элементов приблизительно одинакового размера; эти модели предназначены для того, чтобы можно было различать отдельные объединения непроизводных элементов. Особенно удобна модульная организация с точки зрения распознавания, поскольку она может выявлять различия в чувствительности и устойчивости при условии, что все элементы, образующие некоторый заданный модуль, отличаются приблизительно одинаковыми уровнями устойчивости и чувствительности.
↑ Представление трехмерных моделей
Мы сформулировали требования, которым должно отвечать представление формы объектов при распознавании, исходя из критериев доступности, удобства получения и использования описания, допустимого разнообразия описаний и их однозначности, устойчивости и чувствительности. Мы пришли к выводу, что конструкция представления, удовлетворяющего указанным критериям, должна предусматривать использование системы координат, привязанной к объекту, и объемных непроизводных элементов формы объекта (хотя, возможно, и не исключительно объемных), а также должна придавать какую-либо разновидность модульной организации непроизводным элементам, входящим в описание. Выбор этих решений окажет существенное воздействие на все последующие, и, в частности, как непосредственное следствие этого выбора можно определить один конкретный тип представления — представление трехмерных моделей.
Естественные системы координат
Нашу первую задачу составляет определение некоторой системы координат, привязанной к объекту и ориентированной на представление его формы. Для того чтобы эта система координат была канонической, ее оси должны соответствовать важнейшим геометрическим характеристикам формы объекта. И наоборот, представление должно быть рассчитано лишь на те формы объектов, для которых данное условие можно выполнить. В качестве естественных осей координат для формы объекта можно указать пространственную протяженность, симметрию, даже перемещение (например, ось вращения) ; так, система координат для колбаски должна задаваться ее главной осью и кривизной, а система координат для лица — его осью симметрии. Объекты, "оси координат” которых многочисленны или плохо определены, как, например, сфера, дверь или скомканная газета, неизбежно порождают неоднозначности. Для объектов столь правильной формы, как сфера, это не вызывает особых проблем, поскольку в любой достаточно разумной системе координат ее описание остается одним и тем же. Дверь характеризуется четырьмя различными осями координат, соответствующими ее длине, ширине, толщине, а также оси, относительно которой она поворачивается. Поскольку число описаний, возникающих в данной ситуации, невелико, а двери являются важными объектами, то каждое из четырех допустимых описаний двери можно рассматривать как отдельный случай. Однако иначе обстоит дело для скомканной газеты, когда, по-видимому, число осей координат велико, а определены они плохо.
В настоящее время лучше всего мы разбираемся в тех задачах, в которых оси координат определяются пространственной протяженностью или симметрией объектов, и для простоты мы ограничим диапазон представления трехмерных моделей объектами, формы которых допускают использование осей координат этого типа в качестве естественных. Один обширный класс объектов, формы которых удовлетворяют этому условию, составляют обобщенные конические поверхности. Этот класс форм важен для нас не потому, что удобно описывать соответствующие поверхности, а потому, что объекты этого класса обладают хорошо определенными осями координат.
Именно это обстоятельство является решающим, позволяя задавать некоторую каноническую систему координат, привязанную к объекту, т. е. оно обеспечивает решение, несомненно, основной и самой трудной из всех тех задач, с которыми мы в данном случае сталкиваемся.
Диапазон возможностей такого представления включает значительное число реальных объектов, так как объекты, форма которых возникает в результате действия процессов роста, часто допускают вполне естественное описание с помощью одной или нескольких обобщенных конических поверхностей. Несколько примеров такого рода приведено на рис. 5.1: отдельные кусочки щеточек, из которых составлены фигурки животных, представляют собой как раз оси обобщенных конических поверхностей, приближенно представляющих форму отдельных частей тела изображаемых животных.
Описания, основанные на использовании осей координат
Для облегчения распознавания непроизводные элементы представления также должны соответствовать устойчивым геометрическим характеристикам. Естественные оси координат форм объектов удовлетворяют этому условию, и, следовательно, мы воспользуемся этими осями для задания непроизводных элементов представления трехмерных моделей. Описание, в котором используются непроизводные элементы, порожденные осями координат, можно рассматривать как некую фигуру из палочек (аналогичную изображенным на рис. 5.1), однако при этом следует иметь в виду, что эти палочки выступают в роли локальных осей координат. Хотя такое описание передает лишь часть информации о форме объекта, именно эта информация представляет особую ценность для распознавания. Мы еще больше сократим объем информации, содержащейся в этих непроизводных элементах, ограничив ее лишь информацией о размерах и ориентации. Это позволит нам формулировать представление трехмерных моделей, в минимальной степени связывая себя несущественными деталями. Мы не будем затрагивать здесь и некоторые более сложные проблемы, такие как криволинейность осей координат или схождение формы объекта на конус по его оси координат.
Идея представления формы объекта с помощью конструкции из палочек не нова. Так, Блам рассматривал процедуру классификации двухмерных силуэтов, основанную на использовании метода ’’пала” для построения одной из разновидностей конструкции из палочек по формам соответствующих объектов (рис. 5.2),
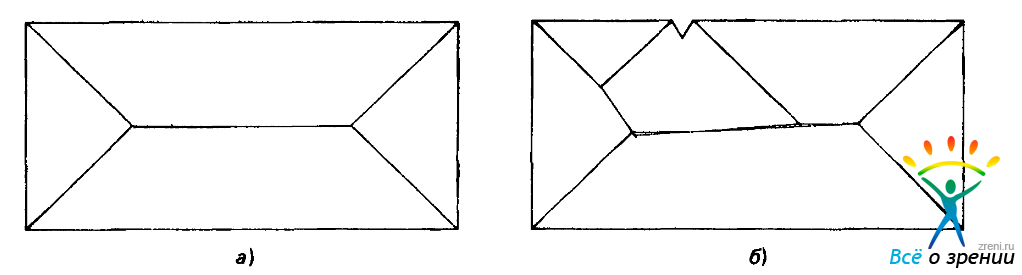
Рис. 5.2. Метод ’’пала” для восстановления оси по силуэту, предложенный Бламом: по границе объекта зажигается огонь, и местоположение оси определяется линией столкновения огненных валов Этот метод, однако отличается повышенной чувствительностью к малым возмущениям контура, что нежелательно: а — прямоугольник, обработанный методом Блама; б — прямоугольник с вырезом, обработанный методом Блама
а Бинфорд ввел понятие обобщенной конической поверхности для представления формы трехмерных объектов. Этим представлениям, однако, свойствен один существенный недостаток — они не сообщают содержащейся в них информации никакой модульной организации. Так, например, каждой части руки от плеч до кисти в таких представлениях формы тела человека может соответствовать, самое большее, один элемент (палочка); невозможно добиться того, чтобы в одном и том же описании единственная палочка соответствовала руке в целом, а три палочки меньших размеров соответствовали бы основным частям руки.
Модульная организация представления трехмерных моделей
Разбиение на модули описания, используемого при распознавании, должно быть точно определено: такое разбиение должно существовать и являться однозначно определенным. В представлении трехмерной модели в том варианте, как оно определялось до сих пор, лучше всего при выполнении этого разбиения основываться на осях координат формы объекта. Каждой из этих осей можно поставить в соответствие приближенную пространственную информацию, что позволит естественным образом сгруппировать оси координат основных составляющих формы, входящих в диапазон допустимых для данного представления. Модуль, определенный таким способом, мы будем называть трехмерной моделью. Итак, всякая трехмерная модель определяет следующее:
1)ось модели, т. е. отдельную ось, характеризующую форму пространства, занимаемого моделью; эта ось является непроизводным элементом представления и позволяет получать приближенную информацию о таких характеристиках формы описываемого объекта в целом, как размеры и ориентация;
2)взаимное расположение в пространстве и размеры осей основных компонентов пространственной формы, задаваемой осью модели (эта информация не должна обязательно входить в модель); число осей компонентов должно быть невелико, и они должны иметь приблизительно одинаковые размеры;
3)названия (внутренние ссылки) трехмерных моделей компонентов формы, соответствующих осям компонентов (независимо от того, когда такие модели были построены); их оси моделей соответствуют осям компонентов данной трехмерной модели.
Каждый из блоков на рис. 5.3
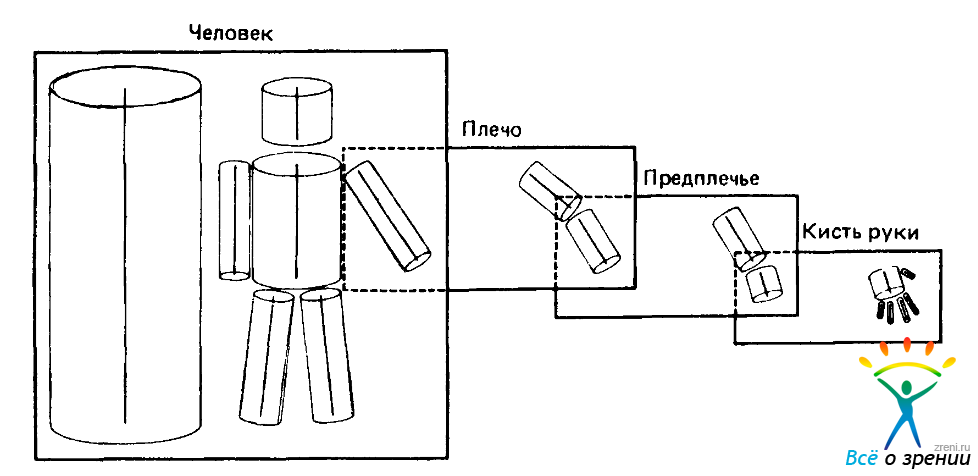
Рис. 5.3. Эта схема иллюстрирует организацию информации о форме объекта в описании трехмерной модели. Каждый блок изображает некоторую трехмерную модель, при этом слева показана ось модели, а справа - расположение осей компонентов. Кроме того, некоторым осям компонентов поставлены в соответствие трехмерные модели, что показано на рисунке с помощью перекрытия блоков. Однако взаимное расположение осей компонентов каждой модели показано не так, как следовало бы, поскольку оно должно было бы быть представлено в системе координат объекта, а не в использованной здесь проекции, полученной с позиции наблюдателя (более правильная трехмерная модель задана с помощью таблицы, приведенной на рис. 5.5,в). Наиболее важными особенностями данного способа организации информации являются следующие: 1) каждая трехмерная модель представляет собой абсолютно независимый блок информации о форме объекта, характеризующийся ограниченной сложностью; 2) информация о форме объекта воспроизводится в виде, удобном для распознавания (расположение пальца оказывается более устойчивым, если оно определяется относительно кисти руки, которой он принадлежит); 3) заданное представление допускает различные варианты использования. Такой подход ограничивает допустимое разнообразие форм объектов в представлении, поскольку его можно использовать лишь для таких форм, которые имеют точно определенные разбиения на трехмерные модели
изображает некоторую трехмерную модель, при этом слева показана ось модели, а справа видно расположение осей компонентов. Ось модели трехмерной модели тела человека переводит в явный вид глобальные свойства (размеры и ориентацию) его целостной формы с помощью единственного непроизводного элемента. Каждой из шести осей компонентов, соответствующих туловищу, голове и конечностям, можно поставить в соответствие некоторую трехмерную модель, содержащую дополнительную информацию о разбиении данного компонента на совокупность меньших компонентов. Хотя отдельная трехмерная модель и является простой структурой, объединение нескольких моделей такого рода с помощью иерархической организации описанного типа позволяет строить описания, характеризующие геометрические свойства поверхности с произвольной степенью детализации. Подобную иерархию трехмерных моделей мы будем называть описанием трехмерных моделей формы объекта.
Пример, приведенный на рис. 5.3, иллюстрирует важные преимущества, которыми обладает модульная организация описания формы объекта. Устойчивость представления существенно увеличивается за счет использования как крупномасштабных, так и мелкомасштабных непроизводных элементов описания формы объекта, а также благодаря выделению локальных пространственных отношений из более глобальных. При отсутствии подобной модульной организации было бы невозможно установить важность пространственного отношения, характеризующего взаимное расположение двух соседних пальцев, по сравнению с отношением, характеризующим взаимное расположение пальца и носа. Модульность обеспечивает также возможность более гибкого использования представления в соответствии с конкретными текущими потребностями. Так, например, нетрудно построить описание трехмерной модели только для плеча человека, которое впоследствии может быть включено в новое описание трехмерной модели, относящееся уже к форме тела человека в целом. И наоборот, приближенное, но допускающее использование описания формы тела человека описание не должно включать детализированного описания плеча. И наконец, использование модульной организации позволяет добиваться увеличения допустимого разнообразия форм в представлении за счет уменьшения степени детализации или увеличения последней за счет уменьшения допустимого разнообразия в представлении. Это упрощает информационные процессы, обеспечивающие получение представления и его использование, так как, несмотря на, вероятно, очень большую сложность полного описания трехмерной модели, в каждый момент времени работа ведется лишь с одной трехмерной моделью, а сложность каждой трехмерной модели ограничена и такова, что не исключает возможности работать с ней.
Система координат трехмерной модели
Известны две разновидности систем координат, привязанных к объекту, которые могли бы использоваться в трехмерной модели. В первой из них все оси компонент, входящие в описание (от туловища до ресницы), задаются в одной и той же системе координат, основу которой составляет ось формы объекта в целом. Во второй используется ’’распределенная” система координат, т. е. каждая трехмерная модель снабжается собственной системой координат. Последний вариант предпочтительнее в основном по следующим двум причинам. Во-первых, пространственные отношения, определенные в описании трехмерной модели, всегда оказываются локальными относительно одной из входящих в это описание моделей и должны задаваться в системе координат, привязанной именно к этой модели, в силу тех же самых причин, по которым мы считаем систему координат объекта предпочтительнее системы координат наблюдателя. В противном случае информация о взаимном расположении компонентов какой-либо модели оказалась бы зависящей от ориентации оси этой модели относительно формы объекта в целом. Так, в частности, описание формы ноги лошади зависит от угла, составляемого ногой с ее туловищем. Во-вторых, помимо этих соображений, касающихся устойчивости и однозначности, доступность, удобство получения и использования представления, а также его модульная организация улучшаются, если каждая трехмерная модель располагает собственной системой координат, поскольку в этом случае ее можнo рассматривать как абсолютно независимый элемент описания формы объекта.
Система координат для задания взаимного расположения осей компонентов трехмерной модели может быть определена либо с помощью оси модели, либо с помощью одной из осей компонентов. Ось, выбранную для задания этой системы координат, мы будем называть главной осью модели. Применительно к приводимым здесь примерам главной осью служит ось компонента, пересекающаяся наибольшим числом других осей компонентов данной трехмерной модели (или проходящая поблизости от них), например туловище животного на его общем виде. Кроме того, необходимо определить положение главной оси относительно оси модели, для того чтобы обеспечивались связи между элементами распределенной системы координат.
Для задания положения в пространстве одной оси относительно другой требуются два трехмерных вектора. Один из способов такого задания проиллюстрирован рис. 5.4,
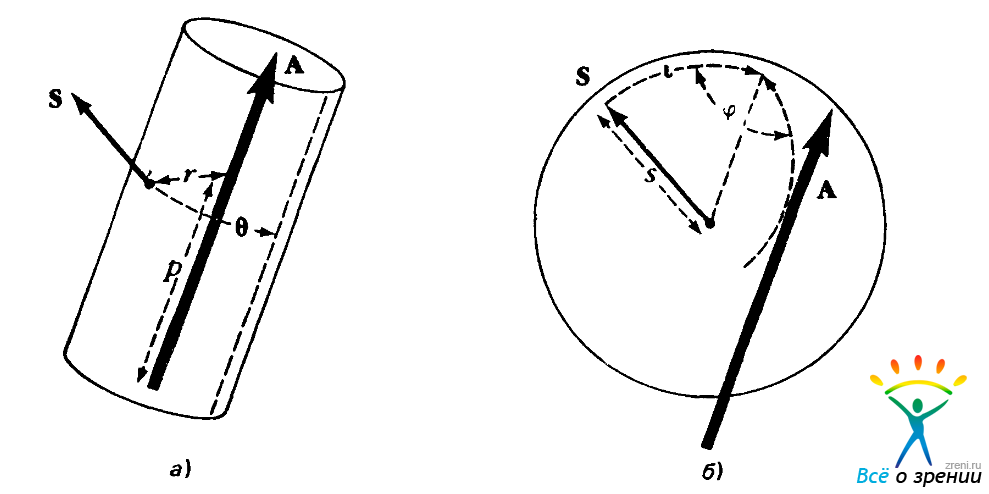
Рис. 5.4. Расположение осей трехмерной модели в пространстве находится с помощью соотношений, определяемых на парах этих осей и называемых отношениями присоединения. Пространственное расположение одной оси S определяется относительно пространственного расположения другой оси А заданием местоположения одной из ее концевых точек относительно положения другой оси А в цилиндрической системе координат (р, r, ?) и заданием ориентации и длины оси S в сферической системе координат (i, ?, s) с центром в указанной концевой точке и соосной осью А (б)
на котором положение вектора S относительно вектора оси А задается с помощью двух векторов. Первый вектор, представленный в цилиндрической системе координат (р, r, ?), задает начало вектора S относительно вектора А (рис. 5.4, а); второй вектор, представленный в сферической системе координат (l, ?, s) задает собственно вектор S (рис. 5.4,б). Мы будем называть этот объединенный набор координат (р, r, ?, l, ?, s), совместно задающий вектор S отношением присоединения вектора S относительно вектора А.
Поскольку точность, с которой форма может представляться трехмерными моделями, непостоянна, то целесообразно значения длин и углов, входящих в отношение присоединения, также представлять с помощью некоторой системы, допускающей возможность изменения точности представления. Так, например, возможно, возникнет необходимость задать положение некоторой оси следующим образом: пусть компонент ’’рука (от плеча до локтя)” тела человека (см. рис. 5.3) находится почти на самом конце туловища (т. е. значение параметра р точно равно 0), значение угла ? задано лишь очень приближенно, а на возможные значения угла l наложены лишь очень слабые ограничения. Пример соответствующей системы координат, допускающей возможность изменения точности представления, приведен на рис. 5.5.
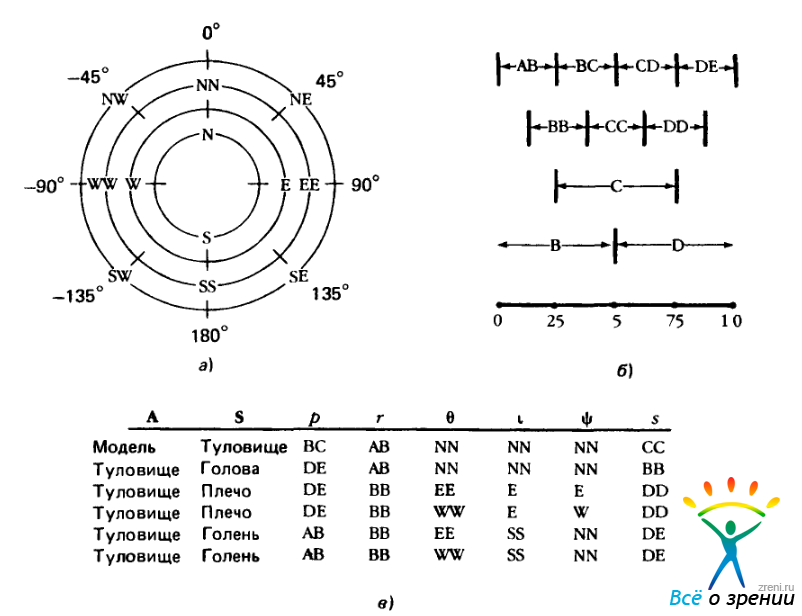
Рис. 5.5. Значения углов и расстояний должно задаваться в отношении присоединения с учетом допустимых отклонений, чтобы особенности этих параметров отражались в представлении в явном виде. Один из способов достижения этой цели иллюстрируется схемами, позволяющими приписывать символические обозначения отдельными частями диапазонов значений угловых (а) и линейных (б) величин. В таблице (в) приведен пример отношений присоединения, записанных с помощью введенной символики для трехмерной модели тела человека, которая изображена на рис. 5.3. Векторы А и S соответствуют двум осям, связанным отношениями присоединения, записанными в строках таблицы (каждая строка задает одно отношение присоединения). При замене мнемонических имен в столбцах А и S внутренними ссыпками на соответствующие трехмерные модели (если они существуют; в противном случае запись в соответствующей строке столбца отсутствует) в этой таблице будет иметься, в сущности, вся информация, содержащаяся в трехмерной модели
Продолжение в следующей статье: Представление форм объектов при распознавании ¦ Часть 2
----
Статья из книги: Зрение | Д. Марр

Комментариев 0